Projekt - Flyga paketLika bra göra nåt åt saken. Måste ju prova i alla fall.
Med APM är det inte svårt göra ett mission att flyga från ett ställe till ett annat och sen tillbaks.
Kort sagt: Programmera rutten. Starta på ett ställe, flyga rakt upp, flyga raka vägen (?) till mottagaren, landa, släppa lasten, flyg hem och landa.
Typ: Mission Planner, klickar ut Home, Autotakeoff, WP1 en bit rakt upp, WP2, 3 osv på vägen om det behövs... WP4 rakt ovanför dit man ska, sen LAND eller gå ner till en viss höjd med ekosensor och släppa lasten. Man vill ju inte landa galet, men man kan ju ha vettiga landställ så går det säkert. Använder MPs autoshutter-servo-funktionen för att släppa föremålet, sen autotakeoff, upp till en WP, RTL. Det svåra blir att matcha landningsplatsen med kartan. Det är ju lite skevt o vint i Google Maps. Funkar tex bra för mig att flyga exakt rakt över Djäkenfältet från ända till ända. Men när Alandia Map ska landa med flyg så ska den alltid ner i Nilen, fast det ser bra ut på kartan i MP. Men iofs hade han märkt att det fanns olika koordineringssystem eller kartor i MP. Nån va "bra" bara.
Synd bara att man måste ha så stor och farlig multirotor för att ta större paket. Mediciner lät bättre. Men sen är det ju det där med räckvidd också... har man en flygtid på 10 minuter med last (600 sekunder) och flyger 12 m/s (vanligt med APM när man fotar ok snabbt), dvs 300 sekunder max ena vägen så kommer man 300 x 12 = 3,6 km. Rätt ok ändå...
1. Få DJI F550 klar
2. Få till funktionerna så att man kan starta var man vill och flyga dit man vill och landa där
3. 3D-printa en enkel hållare för en låda (wellpapp/karton)
Klart!
Blir väl att flyga utanför "den blå fyrkanten", annars är man ju olaglig om man ska flyga kommersiellt.
Räckvidd 3,6 km blir:
Attachment:
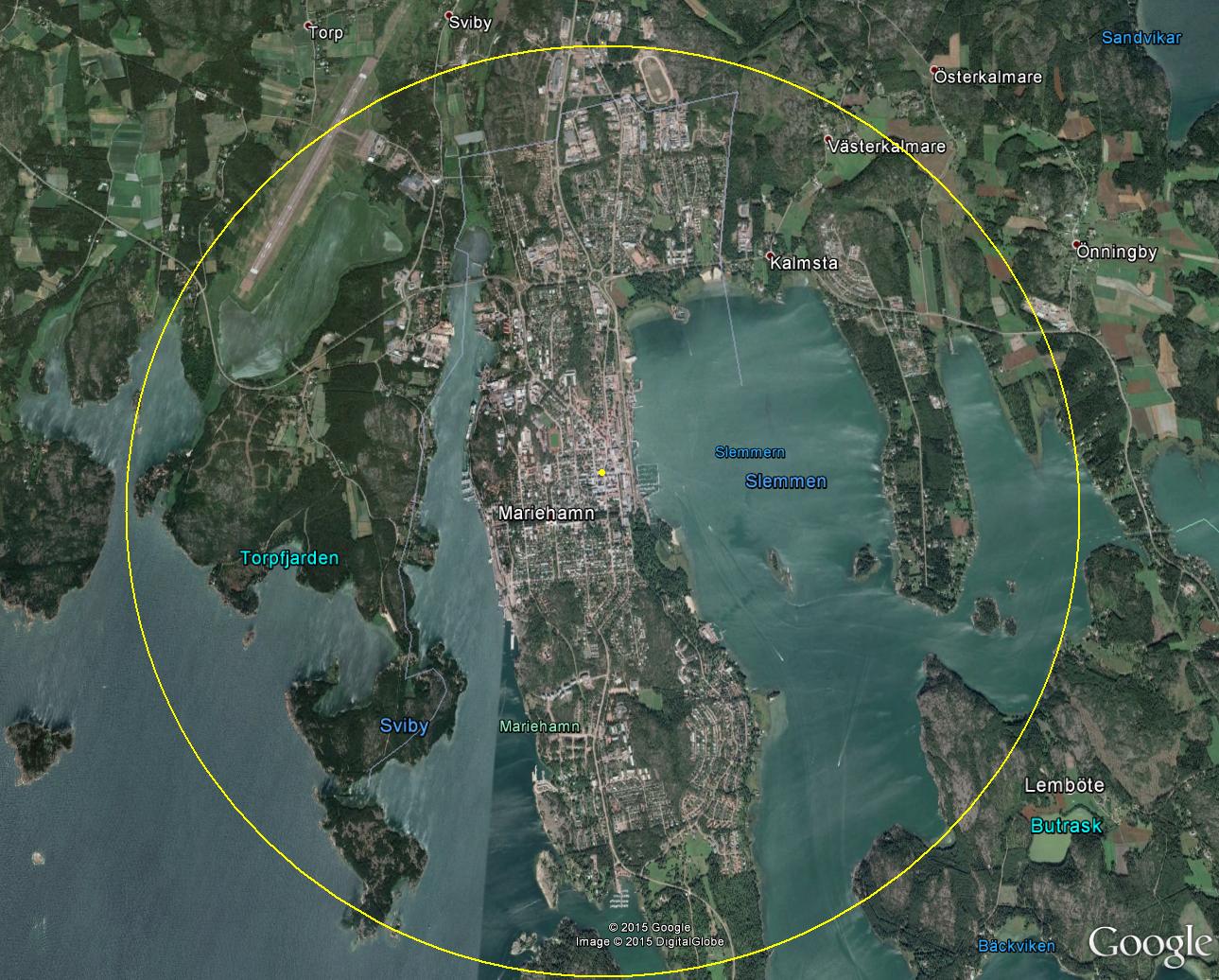 PostDroneMap.JPG [ 254.31 KiB | Viewed 21340 times ]
PostDroneMap.JPG [ 254.31 KiB | Viewed 21340 times ]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}