Info om APM 2.6 styrkortet, eller flight controllern (FC) och dess kringutrustning...
Min egen förklaring för att ge den som läser detta lite bättre hum om vad det handlar om.
Tillverkare är 3DRobotics ( http://www.3drobotics.com ).
Det har funnits tidigare versioner, 2.5, 2.0 och säkert fler versioner och varianter.
Det stora nya med 2.6 är att kompassen är utflyttad och sitter numera i den externa GPSen.
APM används till flyg, helikoptrar, multikoptrar, bilar och båtar (då heter de olika saker och
speciellt när man börjar blanda in FirmWares osv).
Denna APM verkar ha lite olika namn, men det finns kopior. Min är äkta från 3DRobotics.
Finns nån tidigare version som det står Ardupilot på också.
Nya Pixhawk då?
Efterföljare och ersättare är Pixhawk, men den var inte så stabil när jag bestämde mig för denna.
Dessutom har jag en del vana av APM sedan tidigare.
Man kan ansluta grejer till denna APM också:
- Ovan nämnd GPS med inbyggd kompass som kan monteras på en liten mast
- Telemetri (för att upprätta trådlös länk till en bärbar dator)
- Power Module (för matningsspänningen samt övervakning av spänning, ström etc)
- Olika givare som tex avståndsmätare, airspeedsensor, osv
- Power Distribution Board (PDB), dit man ansluter ESCs, bla för quad och hexa
- Servon för gimbal
- Osv
De grejer jag har skaffat är (samt lite mer info om dem)...
APM 2.6
https://store.3drobotics.com/products/apm-2-6-kit-1
Komplett Open Source AutoPilot-system som man kan använda för att göra nästan vad som helst i RC-väg till något självgående. Stöder waypoints så man kan lägga upp avancerade rutter. Behöver en GPS-enhet (se nedan) för autonom användning. Den är Arduino-kompatibel. Den har 3-axligt gyro, accelerometer och barometer (Measurement Specialties MS5611-01BA03). Loggar på ett 4MB dataflash. Använder Invensense's 6 DoF Accelerometer/Gyro MPU-6000. Använder Atmel's processor ATMEGA2560 och ATMEGA32U-2s
Attachment:
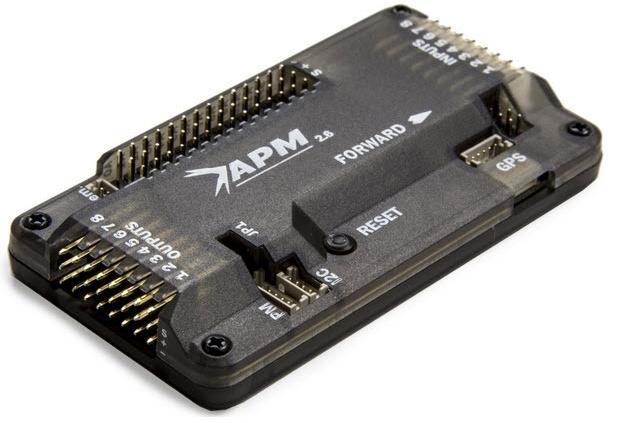 apm.jpg [ 33.7 KiB | Viewed 14296 times ]
apm.jpg [ 33.7 KiB | Viewed 14296 times ]
GPS-kompass (och jag har även masten)
https://store.3drobotics.com/products/3 ... th-compass
Digitial kompass (HMC5883L). GPSen har större antenn (25x25mm keramisk patch-antenn) än många andra GPSer, därav dess noggrannhet. Den har även ett uppladdningsbart 3V Litium-batteri för förvärmning/backup. Ansluts till APM med två kablar, en för I2C (kompassen antar jag, eller om det har att göra med EEPROM-lagringen) och en för GPS. GPSen använder en ublox LEA-6H modul, 5 Hz uppdateringsfrekvens, LNA- och SAW-filter, Low noise 3.3V-spänningsregulator, I2C EEPROM (configuration storage), Power och Fix LEDs. Den ska placeras så långt bort från batteri, ESCar och motorer som möjlig för att komma bort från magnetiska störningar. Kompassen är känslig mot störningar. I riktiga flyg har man en deviationstabell som översätter de felaktiga kompassvärdena till geografiskt rätta.
Attachment:
 gps.jpg [ 17.83 KiB | Viewed 14296 times ]
gps.jpg [ 17.83 KiB | Viewed 14296 times ]
Telemetri 433MHz
https://store.3drobotics.com/products/3dr-radio
En modul på multicoptern (ansluten till APM) och en på marken (ansluten till en bärbar dator). Finns 915MHz och 433MHz överföringsfrekvenser. 915 är olagligt här, antar att det beror på att 4G-nätet är på samma? Med telemetri kan man övervaka allt som händer och även styra, live, mer om det senare. Kan även användas till surfplattor. Den använder 100 mW ställbar sändareffekt, -117 dBm mottagarkänsliget, baserad på HopeRF’s HM-TRP modul, 2-vägs full-duplex kommunikation genom adaptiv TDM, UART interface, Transparent seriell anslutning, MAVLink protocol framing, Frequency Hopping Spread Spectrum (FHSS), upp till 25% felkorrigering för bitöverföringen, Open-source SIK Firmware, allt ställbart via Mission Planner (programvaran i datorn) och APM Planner (en nyare sort/version jag inte ska använda nu). Matas med 3.7-6 VDC. Sändarström 100 mA vid 20 dBm och mottagarström 25 mA. 3,3V UART seriellt interface.
Attachment:
 telemetri.jpg [ 37.08 KiB | Viewed 14296 times ]
telemetri.jpg [ 37.08 KiB | Viewed 14296 times ]
Power Module
https://store.3drobotics.com/products/a ... connectors
Anslut acken till denna. Denna ansluts sedan till PDM (se nedan) eller direkt till ESCarna. Denna spänningsregulator (samt fler funktioner) ser till att APM och kringutrustningen (inte motorer, ESCs och servon) får en stabil spänning från en switchad spänningsregulator som ger ut 5.3V (max 2,25A) från max 4S LiPos. XT60-kontakter är det som gäller. Max 18V in, klarar av att mäta max 90A. Ansluts med en kabel till APM (den som matar mottagare, APM, GPS, osv).
Attachment:
 pm.jpeg [ 7.84 KiB | Viewed 14296 times ]
pm.jpeg [ 7.84 KiB | Viewed 14296 times ]
Power Distribution Board (PDB)
https://store.3drobotics.com/products/q ... on-board-1
Finns för quad och för hexa. Jag kommer dock inte att använda min eftersom min quad redan var förberedd. Den distriuberar helt enkelt spänningen från acken till ESCarna samt att alla ESCs signalkablar ansluts till denna. Vidare ansluter man PDB till APM.
Attachment:
 pdb.jpg [ 29.23 KiB | Viewed 14296 times ]
pdb.jpg [ 29.23 KiB | Viewed 14296 times ]
Nu är det så långt kommet i projektet att allt är införskaffat, quaden är byggd och allt är anslutet.
Nu återstår att rabbla upp begrepp och benämningar kring detta ämne, för APM är allt annat än oluddigt.
Ska dessutom ansluta allt och få till nåt av det hela. =) Konfiguration!
|